Come to Grips with remote task performance
Grips is a mature product with a long history of field service in
the most demanding of applications. Since its introduction in
1982 hundreds of Grips manipulator systems have been
installed worldwide to complete tasks in the deep ocean, and in
nuclear, aerospace, electric utility, and military applications.
Todays Grips system incorporates the latest in Kraft control
system technology.
Undersea or on dry land, when ease of operation, and
responsiveness to operator command are important, Grips is
the performance leader.
Grips is a 7-function, hydraulic manipulator for use on both
manned and remotely operated vehicles. Design features
which make Grips a good choice for many applications include
a four bar linkage design, which allows most of the arm's
weight to be located around its base, and the use of zero
leakage rack & pinion actuators which allow Grips to be
configured for either base up or base down mounting.
Intuitive master/slave control allows even an inexperienced
operator to perform work tasks with human like motion and
speed. Force feedback dramatically improves operator
awareness and allows the operator to perform tasks more
quickly and perform tasks of much greater complexity. In
addition to improved telepresence, the compliant nature of a
force feedback system greatly reduces the risk of accidental
damage to both the work site and the manipulator arm.
Kraft's unique method of controlling the gripper allows
the operator to proportionally vary the rate of jaw closure,
and the amount of grip force.
Grips is capable of completing a wide variety of complex tasks in unstructured environments.
McDonnell Douglas Space Systems neutral buoyancy tank. By simulating the weightless conditions found in space, engineers are able to evaluate assembly techniques where astronauts and robotic arms would work together.
Aerobraking is considered to be critical technology for
cargo-carrying and human spacecraft bound for the planet Mars.
Meeting The Challenge
Grips force feedback manipulator arms are used to
perform a wide variety of tasks in undersea and terrestrial
environments. In applications where superb arm dynamics
and controllability are paramount Grips delivers. When work
must be completed in a timely manner, and with little risk
of damage to the work site, the advantage of having force
feedback is significant.
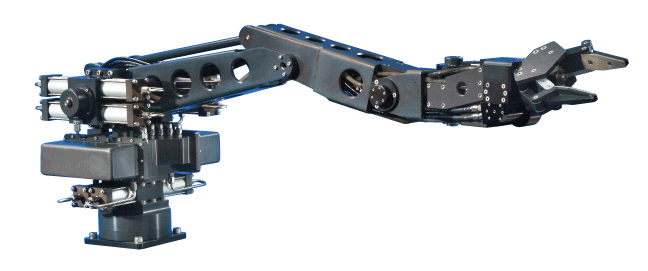
Grips can be operated base up, as shown, or mounted in a
base down configuration. The highly intuitive nature of the
Grips system allows the operator to easily control two
manipulator arms at the same time. Force feedback makes it
possible for two manipulator arms to simultaneously handle
and manipulate a shared object, as if you were handling the
object with your own two arms.
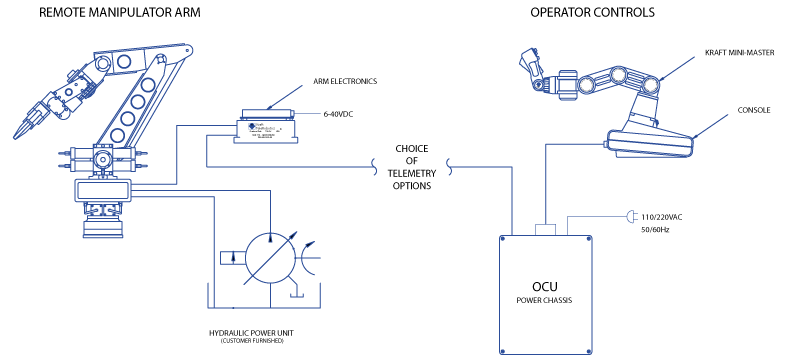
Grips requires only one electrical
connection and a pressure & return
hydraulic connection. All valves are
packaged as an integral part of the
manipulator arm, eliminating the
cumbersome hydraulic lines that
would be necessary with a remote
valve package. A square, four-bolt
flange makes mounting the
arm simple.

Grips manipulator arms are used in
numerous programs involving the application
of manipulator technology for power line
maintenance. This telerobotic "bucket truck"
manufactured by Aichi Corporation in Japan,
allows an operator to perform installation,
repair, and maintenance tasks on energized
power lines using the two insulated force
feedback Grips arms. A single operator can
control both manipulators, as well as all
boom functions, while comfortably seated in
the weather proof cabin.

Innovation in Control Technology
KMC 770 Advanced Operating System
The KMC 770 control system offers many standard
features which enhance system performance and
ease of operation. These features include:
- One button indexing - the ability to offset master position relative to the manipulator for operator comfort.
- Power alignment - allows the operator to realign the master with the manipulator after indexing. When initiated, the master controller will move into alignment with the manipulator under its own power.
- Joint lock - used to selectively lock one or more axes of the manipulator so that motion at the master has no effect on the locked axis.
- Joint scaling - the ability to alter the ratio of master arm movement to manipulator arm movement. Scaling can be established for each joint individually.
- Joint limits - the ability to establish individual joint motion limits to prevent arm impact with peripheral equipment.
- Proportional control of grip force - greatly enhances manipulator performance and is far superior to conventional rate or position control.
- Auto stow/deploy - allows the operator to automatically stow or deploy the manipulator using a previously programmed routine.
- Robotic operation - provides the ability to teach the manipulator a routine or sequence and permanently save it for execution at a later time.
- System diagnostics - provides comprehensive tools for evaluating and troubleshooting the system.

As the vital link between the remote manipulator and the human operator, the Kraft force feedback mini-master® allows the operator to control complex manipulator motions in a comfortable and intuitive manner. Electric actuators on the individual joints of the master respond to the forces acting upon the manipulator arm, providing force feedback to the operator. Conveniently located switches on the master provide the operator with direct access to core manipulator functions for faster arm operation. The mini-master® is designed for comfortable left-hand or right-hand operation.
In its standard configuration the mini-master® is mounted to a compact, portable, operator control unit that can be placed on nearly any surface for operation. A color liquid crystal display allows the operator to view system information and menus. Pushbutton keys surrounding the display allow the operator to select various operating options.
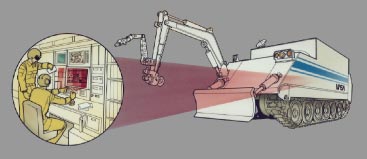
An experimental NASA HazMat vehicle equipped with a Grips manipulator
arm to assist emergency personnel while responding to a chemical,
biological or radiological threat.